吳校生:水下微小無人機集群發展綜述
點擊: 作者:吳校生 來源:數字海洋與水下攻防 微信號 發布時間:2021-02-15 12:31:35

《數字海洋與水下攻防》刊載范圍主要包括:智慧海洋、海洋環境、海洋信息、海洋大數據、水下攻防體系、水下警戒探測、水下信息網絡與指揮控制、水下智能對抗、水中兵器及無人裝備等。系《中國學術期刊綜合評價數據庫》統計來源期刊、《萬方數據——數字化期刊群》收錄期刊、《中國核心期刊(遴選)數據庫》收錄期刊,被《中國期刊全文數據庫(CJFD)》、超星期刊域出版平臺全文收錄。
作者:吳校生
作者單位:上海交通大學 微米/納米加工技術國家級重點實驗室
作者簡介:吳校生,男,博士,副研究員,主要從事微機電系統技術及其應用的研究。
摘 要 水下微小無人機集群具有體積小、功耗低、集群智慧等特點,可廣泛應用于船舶故障排查、水下防恐安全檢查、海底采礦、海底通訊中繼等領域。CoCoRo,M-AUEs,SmarmDiver等典型水下微小無人機集群成功實現了海洋生物行為模擬、海洋生態環境監控、水底搜索等功能。水下微小無人機集群在多傳感器搭載及數據融合、水下通訊、定位、集群控制等技術上還需進一步完善,我國應加強在該領域的研究開發。
關鍵詞 水下無人機;微小;集群
引 言
水下無人機的工作模式可分為單體模式和集群模式。單體工作模式的水下無人機(也被稱為水下機器人)功率大、航速大、航程遠,攜帶的任務執行器、傳感器、通訊定位器件多,功能全面,自動化程度高,已經在海防、水底搜救、水文勘測、故障排查等領域有了廣泛的應用。但單體水下無人機也存在不足[1],如:功耗大,需具備強大的能源裝置;魯棒性不強,一旦部件發生故障則任務執行失敗;造價昂貴,不適合大批量集群布局;體積大帶來隱蔽性差、滲透性不好;要求水下長距離通訊,增大了通訊及定位難度。
近些年來,國內外重視開展了水下微小無人機集群技術的研究。水下微小無人機集群通常由幾十上百個個體組成,每個個體體積小、功耗低、功能單一、造價便宜。工作時,個體之間分散布局在一個較大的水域,形成水下三維空間大區域的覆蓋。個體在集群中的分工明確、協同工作,非常適合在指定區域進行快速水文搜集、定點通訊中繼、水下故障排查等水下工作[2]。采用集群工作方式具有很大的魯棒性,系統冗余特性能確保個體出現問題但不影響集群的整體工作[3]。集群模式下的水下無人機個體小,具有很好的隱蔽性和滲透性,不易被發現。由于每個個體都可以作為通訊中繼,因此集群可實現較遠距離的無線水下通訊。
集群模式下可具備集群智慧。自然界中的魚群在捕食、遷徙或是躲避敵害時常常會呈現集群行為模式。個體的行為主要由吸引力和排斥力的合力決定,當吸引力和排斥力相抵消的時候,生物界稱之為“平衡距離”。個體依靠其廣角視覺和敏感的側線系統,可以獲得高度同步的速度和方向。在集群智慧作用下,集群模式可協力更好地完成個體模式實現不了的強大任務。
水下微小無人機集群雖然具有諸多優勢,但也存在明顯的不足[4],如:驅動力有限,易受水流的影響而失去控制;須有及時的能量補充等。當前,國內外針對水下微小無人機集群開展的研究工作還是起步階段,本文針對這些工作及進展進行綜述,以供決策參考。
1 水下微小無人機集群的應用
地球陸地面積占地表面積的29%,剩余的71%為水域面積。經過數萬年的文明歷程,人類對陸地的探索較為充分,但受限于技術手段,人類對水下世界的了解還甚少。地球水下最深的地方是馬里亞納海溝,深度約為11 km,此處的水下壓強約為大氣壓強的1 100倍。業余潛水員潛入水下40 m的深度時,單次只能停留幾分種,專業的潛水員最深能潛到300 m的深度。要想了解更深的水下世界需要借助潛艇或水下機器人。水下無人機可以潛入到更深的水下空間進行水底地形測繪、海底生物生存狀態監測、礦產資源勘探、海上軍事防御等作業。通過采用小型的、造價低廉的水下無人機組成的集群可增大無人機水下作業的覆蓋面積,提高工作效率[5]。水下微小無人機集群的應用非常廣泛[6],具體敘述如下。
1.1 船舶故障或安全檢查
水下無人機集群的一個典型應用是艦船反恐檢查。海上安全檢查中一項重要工作是防止恐怖組織在大型商用或民用船艇底部放置附著水雷。當海外船只進入中國海域并準備靠岸之前,通常是讓潛水員潛入船底排查,這是一項非常昂貴且危險的工作,并受天氣條件影響。若采用價格低廉的水下微小無人機集群完成這項工作就非常簡單了。通過在被檢查船周圍釋放水下無人機集群,無人機集群潛入到船底協同進行故障或安全檢查,集群合作可快速完成任務。完成任務后的無人機集群接到指令后可自行集結回收。
1.2 海底采礦
在海床上進行礦產資源搜尋與采集是水下微小無人機集群另一個潛在應用。例如:美國發現在夏威夷島的海床上,由于火山活動造成海床上分布大量的錳結核礦產資源,錳是一種比較珍貴的礦物質。這些錳結核分布的區域廣并且處于較深的海域,如果讓潛水員去采集會非常危險。通過水下微小無人機集群去完成這項工作會是非常經濟實用的方式。
1.3 石油鉆井平臺水下維護
當前,鉆井平臺水下結構的維護都是通過專業潛水員或遠程控制的機器人去執行。專業潛水員在極大水壓下長達數天的水下操作是非常危險也是繁重的工作,水下微小無人機集群非常適合應用于這種水下機構的清洗、故障微小或其它常規維護檢查,這可減少專業潛水員或遠程操控水下機器人的水下作業量。
1.4 其它應用
水下微小無人機集群還可用于海洋有毒物質的搜尋,海底光線的維護或排查等。在軍事領域,水下微小無人機集群還可用于水下通訊中繼。水下無人機集群在水下或水面進行組網布局,可用輔助潛艇或其它水下軍用裝備的通訊或定位,提高通訊效率和定位精度。在作戰或敏感海域布局水下微小無人機集群還可用于封疆或海底偵察等。
2 水下無人機集群國內外的發展
水下無人系統組網化和協同化已得到各國的重視。美軍不再強調追求單個水下無人平臺功能的最大化、最強化,通過系統集成手段,將單一復雜系統的功能分布化,通過組網、集群形成分布式作戰能力。水下“集群”作戰通過信息鏈路將水下無人自主系統組網,是實現能力倍增、更好地解決特定問題的有效途徑。世界各國都在爭相發展水下無人機集群技術。
2.1 歐盟的CoCoRo水下微小無人機集群[7]
為了研究微小型水下無人機集群,歐盟于2011年設立CoCoRo項目,CoCoRo全稱為Collective Cognitive Robotics,即集體認知機器人,項目資助經費為290萬歐元。在該項目資助下,奧地利Graz大學人工生命實驗室研究人員于2015年9月發布了由41個水下機器人微小個體組成的當時世界上數量最多的水下機器人集群,如圖1所示。他們的研究目標:了解機器人網絡是否能夠展示群體認知,將該系統形成的群體智能與自然界中的生物集群進行比較研究。
CoCoRo機器人個體的平面尺度約12 cm,安裝有3個執行驅動裝置分別控制水平方向上的2個自由度(平移或繞行)和垂直方向上的1個自由度(沉浮)。個體之間采用LED光信號方式進行短距離通訊,同時輔助有RF通訊和聲吶長距離通訊與定位,個體還搭載有光學傳感器、慣性傳感器、壓力傳感器等。
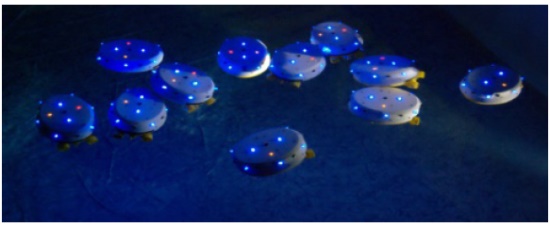
圖1 CoCoRo水下微小無人機集群
2.2 加州大學San Diego分校的微小水下探索者(M-AUEs)集群[8]
2017年1月,美國加州大學San Diego分校報導了一種個體體積為1.5 dm3的水下微小無人機集群,他們稱之為微小水下探索者(Miniature Autonomous Underwater Explorers,簡稱M-AUEs)。該微小機器人可模仿海洋浮游生物的行為,他們用了16個M-AUEs組成的集群進行了水下實驗,如圖2所示。
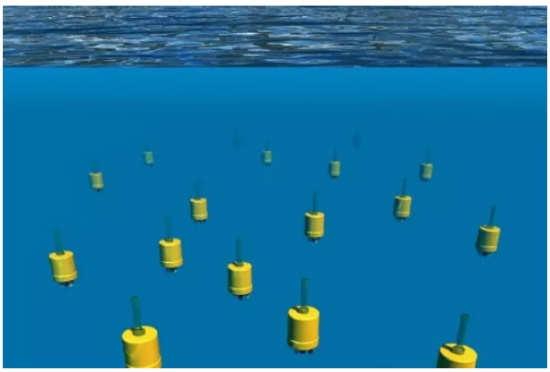
圖2 加州大學San Diego分校微小水下探索者(M-AUEs)集群
他們在M-AUE上安裝了浮力控制裝置用于控制深度,同時還搭載了溫度傳感器、壓力傳感器、水聲傳感器、發光LED、GPS天線、RF信標等裝置。在5 h的實驗過程中,16個M-AUEs組成的集群分布于300 m直徑的海域內并隨著洋流漂移,浮力器控制集群10 m水深,集群在海底三維空間內采集溫度信息,集群收集到的溫度數據為研究洋流對浮游生物生存狀況的影響提供參考。
2.3 美國Aquabotix公司開發的SwarmDiver水下微小無人機集群[9-10]
美國Aquabotix公司開發的SwarmDiver水下微小無人機是近年比較成功的商業產品。它的長度為75 cm,重量為1.7 kg,能達到的水下深度為50 m,最大航速為8 km/h,最大運行時間150 min,搭載有溫度和壓力傳感器,能以40個以上個體的集群模式工作。SwarmDiver于2018年投入市場,目前有Stealth,Nightline和Edge三款產品,單個售價1 000~10 000美元不等。據Aquabotix公司介紹,SwarmDiver可用于海洋環境監控、羽流跟蹤、3D數據網絡收集、自主聲探等。
SwarmDiver還具有很多軍事用途。從2018年SwarmDiver投入市場到現在1年多的時間內,美國海軍對Aquabotix公司的SwarmDiver做了3次采購合同,分別為:2018年6月美海軍花費78 000美元委托Aquabotix采用SwarmDiver協助海軍搜尋定位水底“未爆炸的軍械”;2019年1月美海軍花費70 000美元與Aquabotix簽署第2個合同,用于向海軍人員展示或測試SwarmDiver性能;2019年5月有報導美海軍花費約150 000美元用于購買SwarmDiver。此外,SwarmDiver還獲得了澳大利亞海軍的貿易合同。

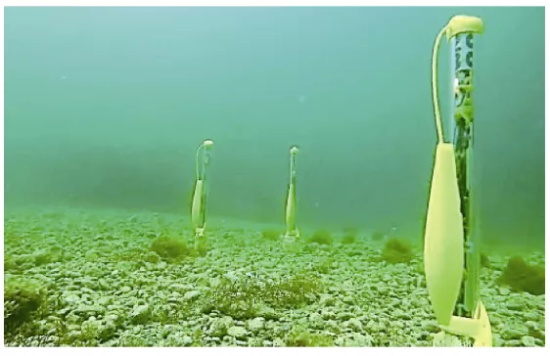
圖3 Aquabotix公司開發的SwarmDiver水下微小無人機及集群
2.4 國內對水下微小無人機集群的研究[11]
近些年來,國內的一些高校或研究所都在開展水下無人機集群的研究工作,這些高校或研究所包括中科院沈陽自動化研究所、哈爾濱工程大學、西北工業大學、天津大學等。如:中科院沈陽自動化研究所先后研制了“探索者”、“CR01”、“CR02”、“潛龍一號”、“潛龍二號”一系列航行器,為我國海底金屬硫化物勘探提供了高效、精細的手段;哈爾濱工程大學完成了300 kg級自主水下航行器(智水-IV)的研制,實現了海域110 km的自主航行和自主布防等功能,潛深可達1 000 m;西北工業大學研制了“300 m航深、300 km航程”和“500 m航深、500 km航程”遠程智能水下航行器,具備航路自主規劃和安全布放回收功能。
當前,國內在大型水下航行器方面的研究已經處在了世界前沿水平,針對水下集群技術研究較多,但水下微小型無人機集群系統的實踐研究報導較少。
3 水下無人機集群的發展挑戰
與工作在空氣中的無人機集群不同,水環境給水下無人機帶來一系列的挑戰,這些挑戰包括:水環境下所采用的傳感器,水下的通訊、定位等。[12]
3.1 傳感器技術及多傳感器數據融合
相比于一般無人機,應用于水下無人機中的傳感器種類要少很多。由于水中的射頻或高頻電磁波不能長距離傳播,因此基于電磁波機理的傳感器就不能應用于水下無人機中。在水下無人機中應用最多的是壓力傳感器,用于測量水深,還有電子羅盤傳感器。實際應用中,要求這2種傳感器具備好的一致性,即長時間使用后它們的精度還需要和第一次使用時的一樣。由于水下沒有GPS信號,水下的定位或軌跡規劃通常需借助IMU(慣性測量單元,即三軸加速度和三軸陀螺)的航位推算技術,但低成本的MEMS IMU時間累積誤差會導致較長時間工作后位置計算偏差越來越大。為了消除時間累積誤差,水下無人機工作一段時間后需要浮出水面來接收GPS信號,以更新準確的位置信息。聲吶傳感器是水下無人機的另一個重要器件,它可以單個工作也可以陣列形式工作。聲吶傳感器可用于測量無人機與周邊物體之間的距離,還可以用于環境地圖測繪。水下無人機通常還搭載有照相系統,用于識別環境,成像效果好壞在很大程度上取決于水質。這些傳感器提供的部分信息是重疊的,數據融合算法可利用這些重疊信息來改善測量精度。
3.2 水下通訊
由于電磁波在水下傳播距離極短,傳統的基于電磁波的通訊及定位技術在水下不能直接應用。研究發現電磁波在水下的傳播距離和波長相關,波長越大(即頻率越小),它的傳播距離越長。因此,為了增大電磁波在水中的傳輸距離,可采用中、低頻聲波。除了采用電磁波通訊外,有的水下無人機還采用可見光來進行光通訊。如,在歐盟開發的CoCoRo集群中,它們用LED燈發出的光強或閃爍頻率來和周邊無人機進行信息傳播。測試發現,這種光通訊數據傳輸率可達到119 kbs。光在水下的傳播距離也不會太長,受水質影響較大。CoCoRo中不僅僅采用光通訊,它還采用了聲通訊。很多海洋生物都是采用聲通訊方式來實現個體之間的信息交流。聲通訊傳播的距離遠,但它也存在一些不足,如經物質反射回來的聲波會對原始聲波產生干擾;聲波頻率較低,導致它的數據傳輸率會很低,低至30 bit/s。
3.3 集群控制理論
集群工作時,集群算法能確保集群執行任務的效率和行動的一致性,通常采用的算法是共識控制(Consensus Control)。在集群控制中,最簡單的辦法是中央控制,即有一個主控制無人機,主控制無人機控制著成員的行為,這要求主機與成員之間時刻保持好的通訊,這在水下環境中很難做到。因此,有人提出去中心化控制系統,如同區塊鏈技術。在去中心化控制系統中,不存在主控制成員,因此大大減輕了通訊壓力,集群中個體只需定位其周邊鄰居個體位置,通訊也是鄰居之間發生的。共識控制就是這種去中心控制方法,通過相鄰個體之間的信息傳遞,集群中每個個體能實時知道集群中所有個體分享的位置、任務、運動等信息。
4 水下微小無人機集群發展趨勢分析
縱觀國內外發展現狀,水下無人機集群在以下3方面必將得到長足發展[13-14]。
1)延長水下工作時間。水下無人機的典型應用是海洋觀察和搜集科學數據,這通常要求無人機能夠在更大的空間范圍和更長的工作時間持久地對海洋進行調查。無螺旋槳驅動模式成為當前的研究熱點,如:近些年開發的水下滑翔機通過調節浮力和機翼來產生浮力,以保持在水下的滑翔運動。另外,一些新的能量采集技術也可被用于水下無人機,用于補充能量延長工作持續時間。采集的能量來源很廣泛,包括:洋底的熱能、洋面的太陽能、洋流能、波浪能、生物能等。
2)仿生水下微小無人機。經過億萬年的進化,水下生物具有最優化的流體動力學外形和運動機制,仿造具有水下生物外形和運動機構的水下無人機可獲得最佳的工作效率。各種類型的微小水下機器人被廣泛研究,如:機器魚、螃蟹、蛇、龜等。當前,這些研發的仿生水下機器人性能還不足夠好,還不能實際應用,但它們具有優越的隱蔽性,在軍事及海洋生物調查等領域具有廣泛應用前景。隨著新能源、新材料技術的發展,仿生水下機器人及其集群必將會得到廣泛和長遠地關注。
3)智能化。近些年來發展得如火如荼的人工智能、物聯網技術將會應用到水下無人機集群,以提高個體的自動化、環境認知能力及形成群體智慧。遙控水下無人機(ROV)和自制水下無人機(AUV)幾乎是同時被提出的,但AUV受制于人工智能、自動控制、傳感等技術,還不能完全替代ROV,AUV和ROV還將長期存在。當前,ROV比較擅長于小區域的精細水下作業,AUV可進行長距離大范圍水下搜尋和探測。環境認知能力可以幫助水下無人機避障、路徑規劃、識別特定目標物。隨著人工智能、物聯網技術的發展,水下無人機的環境認知能力必將大大提升,可通過環境信息及群體知識來辨別未知物體或環境。集群智慧是水下無人機集群智能化的另一個體現,水下集群智慧依賴于水下通信網絡。水下聲通信技術的發展為水下無人機集群智慧的獲取提供有力的技術保障。
結束語
相比于傳統水下無人機,微小無人機集群具有造價便宜、滲透性強、系統糾錯能力強、可采用集群智慧來工作等特點,其在船艦維修、安全檢查、海底采礦、設施維護等領域具有較大的應用前景,已得到廣泛關注。美國、歐盟等國家或地區相繼開發了多款微小型水下無人機集群,并成功地應用在海洋生物生存環境的數據采集、水下目標搜索等領域。這些集群的個體尺寸大多不超過1 m,有的甚至更小,個別微小無人機集群已經完成了商業化生產,并得到軍方應用。水下微小無人機集群很多技術還需要進一步發展與完善,如搭載的傳感器、驅動器的可靠性提高,水下通訊與定位技術等。隨著這些關鍵技術的成熟,水下微小無人機集群的應用空間會更加寬廣。
水下無人機的小型化、價格低廉這些特性有利于它的民用化,如同空中飛行的微小無人機,相信在不久的將來必會掀起新的一輪水下無人機應用高潮。為了趕上這個領域中的創新前沿,政府機構在政策上需足夠重視,加強投資與引導,這樣才能確保我國未來在該領域的領先地位。
原文刊登于《數字海洋與水下攻防》2020年第3期(圖片來源網絡 侵刪)
責任編輯:向太陽
特別申明:
1、本文只代表作者個人觀點,不代表本站觀點,僅供大家學習參考;
2、本站屬于非營利性網站,如涉及版權和名譽問題,請及時與本站聯系,我們將及時做相應處理;
3、歡迎各位網友光臨閱覽,文明上網,依法守規,IP可查。
作者 相關信息
? 昆侖專題 ?
? 高端精神 ?

? 新征程 新任務 新前景 ?

? 習近平治國理政 理論與實踐 ?

? 我為中國夢獻一策 ?

? 國資國企改革 ?

? 雄安新區建設 ?

? 黨要管黨 從嚴治黨 ?

熱點排行



建言點贊

圖片新聞