您好!今天是:2025年-5月2日-星期五
現(xiàn)代科技創(chuàng)新研究模式:以大型復雜構(gòu)件的加工為例
點擊:4272 作者:劉辛軍 來源:中國機械工程學會 微信號 發(fā)布時間:2022-02-18 11:04:29
前言:當前,隨著我國航空航天、能源和國防等領域的蓬勃發(fā)展,對大型航空薄壁件、空間站大型艙體結(jié)構(gòu)件等大型復雜構(gòu)件的高效高質(zhì)量加工需求愈加旺盛,創(chuàng)新性研究的重要性日漸凸顯。
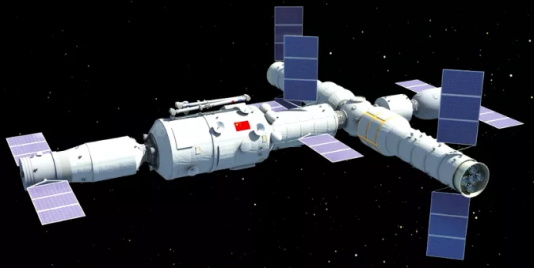
具有大型艙體結(jié)構(gòu)的空間站
然而,傳統(tǒng)的加工裝備如機床、工業(yè)機器人等,難以實現(xiàn)對此類大型復雜構(gòu)件的銑削加工,需要通過科技創(chuàng)新研究提出變革性的技術及裝備,以解決此類大型復雜構(gòu)件的高質(zhì)量制造難題。

傳統(tǒng)機床與工業(yè)機器人
科技創(chuàng)新研究可總結(jié)為“揭示規(guī)律、創(chuàng)造發(fā)明、改造世界”三個階段。我們將這三個階段與古典哲學思想、辯證唯物主義方法論重要思想相結(jié)合,把科技創(chuàng)新研究模式概括為“尋其道、謀其術、求其魂、索其變、用其精”的辯證統(tǒng)一過程。

科技創(chuàng)新研究模式
下面,我們將圍繞大型復雜構(gòu)件加工新裝備與新模式的創(chuàng)新需求,介紹提出的科技創(chuàng)新研究模式。
尋其道
“尋其道”的本質(zhì)是科學觀察與科學認識,是一種好奇探索,是人天性的表現(xiàn)。自然界中的各種生命體在進行生命活動時,總是遵循著一定的規(guī)律,這為我們從事科技創(chuàng)新研究提供了一定的依據(jù)。
例如,長頸象鼻蟲具有長長的頸部,特殊的頸部結(jié)構(gòu)可以提升它們頭部可觸及的范圍并有力地支撐頭部以進行精細啃食,非常有利于撕咬樹葉、構(gòu)建巢穴。

長頸象鼻蟲筑繭
啄木鳥在敲擊樹木的時候,往往會先攀緣在直立的樹干上,利用兩爪緊抓樹干、楔形尾部支撐身體,依靠頸部發(fā)達而強有力的肌肉高速精細地啄木。

啄木鳥啄木
一些手工藝師在雕刻作品時,也會通過腕部的靈巧定位,借由手指的精細動作完成精雕細琢的工作。

手工藝師的精雕細琢
這些例子中都存在共同的特征,即:大范圍移動定位、局部精細化作業(yè)。受這些自然界中生命體作業(yè)特征和長頸象鼻蟲的外形啟發(fā),我們提出了一種大型復雜構(gòu)件原位柔性加工解決方案,并提出了一種移動式加工機器人概念,該機器人由AGV移動車、機械臂和并聯(lián)式5軸運動末端執(zhí)行器構(gòu)成。


長頸象鼻蟲與移動式加工機器人
謀其術
“謀其術”的本質(zhì)是以創(chuàng)造發(fā)明為目標的一種技術應用。在認知并揭示了事物發(fā)展規(guī)律的基礎上,若要產(chǎn)生發(fā)明創(chuàng)造,便要“謀其術”,即尋找合適的方法。
提出的移動式加工機器人,AGV移動車和機械臂是比較成熟的,并聯(lián)式5軸運動末端執(zhí)行器設計是需要解決的難點,采用我們研究的基于Grassmann線幾何和線圖法的構(gòu)型綜合方法這一“術”開展機器人的并聯(lián)機構(gòu)構(gòu)型設計。最終得到一種結(jié)構(gòu)緊湊、輕量化、高靈活性的5自由度并聯(lián)機構(gòu)。

5自由度并聯(lián)機構(gòu)
求其魂
“求其魂”的本質(zhì)是以改進發(fā)明為目標的一種技術應用,它主要包含評價方法和改進方法,體現(xiàn)了人的品性。“謀其術”讓我們獲得產(chǎn)生發(fā)明創(chuàng)造的方法,“求其魂”則是讓我們了解發(fā)明創(chuàng)造中起主導和決定作用的因素,從而發(fā)揮發(fā)明創(chuàng)造的最佳性能、實現(xiàn)最佳效果。
自然界中的生命體常借助過人的力量或速度等特性謀求生存。例如螃蟹的蟹鉗內(nèi)部結(jié)構(gòu)具有四連桿閉環(huán)機構(gòu)特征,該結(jié)構(gòu)通過力增益方式使螃蟹擁有巨大的夾持力。


蟹鉗結(jié)構(gòu)
又如蜂鳥的翅膀關節(jié)內(nèi)含了一個四連桿增速機構(gòu),使其翅膀振動頻率能夠達到80 Hz,從而具備豐富的飛行模式。

蜂鳥飛行
從自然界生命體,我們可以領悟到隱藏在生命體和機器內(nèi)部機構(gòu)的第一功能應該是傳遞運動和力,由此,我們提出并建立了一套機構(gòu)運動和力傳遞與約束特性的性能評價體系,實現(xiàn)了5自由度并聯(lián)機構(gòu)尺寸參數(shù)及結(jié)構(gòu)參數(shù)的優(yōu)化,進而研發(fā)出一臺5自由度并聯(lián)加工機器人。

5自由度并聯(lián)加工機器人
這種機構(gòu)性能評價方法依照了自然界生命體的運動和力傳遞有效性法則,是機構(gòu)設計中性能評價“求其魂”的體現(xiàn)。
此外,我們生活的世界是一個構(gòu)成和行為均是“混聯(lián)”的世界,但為了高效和靈活,兩軸轉(zhuǎn)動往往是耦合(并聯(lián))運動,比如人手腕的轉(zhuǎn)動運動。設計的機器人具有5個自由度,其中的2個轉(zhuǎn)動運動是“姿態(tài)耦合”的,這是該機構(gòu)設計中耦合調(diào)姿“求其魂”的體現(xiàn)。

并聯(lián)加工機器人加工的關鍵零件
采用該機器人完成了具有特殊結(jié)構(gòu)的關鍵零件的高效加工,這些零件的高效、高質(zhì)量加工,是“求其魂”的性能評價和姿態(tài)耦合運動設計起了核心作用。
索其變
“索其變”的本質(zhì)是以實現(xiàn)應用變通為目的的科技創(chuàng)新實踐。要實現(xiàn)對研究目標的進一步創(chuàng)新,需要發(fā)揮人的悟性,通過“索其變”,探索5自由度并聯(lián)加工機器人的變通形式,應對更為復雜的加工需求,從而實現(xiàn)柔性制造。
設計的并聯(lián)機構(gòu)具有輕量化和5軸聯(lián)動運動的功能,我們可以想象把這個5自由度并聯(lián)機構(gòu)作為一個功能單元,變通為一個類似于人手的功能模塊,從而發(fā)明出“移動平臺+機械臂+5軸聯(lián)動并聯(lián)功能模塊”形式的移動式混聯(lián)加工機器人,以滿足大型復雜構(gòu)件的原位加工需求。

移動加工示意圖
這種新裝備與新模式的提出,使得大型復雜構(gòu)件的制造模式產(chǎn)生了顛覆性的變化,相當于把“機床”舉起來,將“鐵打的機床、流水的工件”的傳統(tǒng)加工模式變革為“鐵打的工件、流水的機床”模式。這種新裝備是一種介于機床和工業(yè)機器人之間的機器人化裝備,兼具靈活性、效率和精度的優(yōu)勢。
用其精
“用其精”的本質(zhì)是利用發(fā)明創(chuàng)造以改造世界為目的、以理論技術為指導開展的實踐活動。我們在上述工作的基礎上,還需要對提出的裝備與模式進行合理應用,發(fā)揮其優(yōu)勢,達到“用得好”的目的,即“用其精”,最終實現(xiàn)大型復雜構(gòu)件的高效高質(zhì)量加工。
我們采用設計的移動式混聯(lián)加工機器人,基于多學科交叉,結(jié)合移動平臺自主導航和雙目視覺定位,進行了航天器艙體設備安裝支架端面的原位銑削應用驗證,證實了提出的移動式混聯(lián)加工機器人及原位加工模式是行之有效的。

原位銑削加工驗證
結(jié)語
科技創(chuàng)新研究模式——“尋其道、謀其術、求其魂、索其變、用其精”這一辯證統(tǒng)一過程體現(xiàn)了探索、求真、謀變、務實的科技創(chuàng)新魅力,是人的天性、品性、悟性、習性的綜合表現(xiàn)。該科技創(chuàng)新研究模式遵循了辯證唯物主義重要思想,在科技創(chuàng)新實踐中是有效的,可作為現(xiàn)代科技創(chuàng)新的一種模式,在工程科學實踐中正確運用科技創(chuàng)新研究模式對于技術發(fā)展和社會進步具有一定意義。
作者簡介
劉辛軍,清華大學長聘教授、博士生導師,國家杰出青年科學基金獲得者、教育部“長江學者”特聘教授、國家“萬人計劃”領軍人才。現(xiàn)任國際機構(gòu)學與機器科學聯(lián)合會(IFToMM)中國委員會主席、兼任國家自然科學基金委共融機器人重大研究計劃秘書組組長。擔任Cyber2019和ICIRA2021國際會議大會主席。
以下文章來源于Me工程師 ,作者劉辛軍
責任編輯:向太陽
特別申明:
1、本文只代表作者個人觀點,不代表本站觀點,僅供大家學習參考;
2、本站屬于非營利性網(wǎng)站,如涉及版權(quán)和名譽問題,請及時與本站聯(lián)系,我們將及時做相應處理;
3、歡迎各位網(wǎng)友光臨閱覽,文明上網(wǎng),依法守規(guī),IP可查。
作者 相關信息
現(xiàn)代科技創(chuàng)新研究模式:以大型復雜構(gòu)件的加工
2022-02-18內(nèi)容 相關信息
現(xiàn)代科技創(chuàng)新研究模式:以大型復雜構(gòu)件的加工為例
2022-02-182021年我國科技事業(yè)密集發(fā)力 一批重大科技創(chuàng)新成果競相涌現(xiàn)
2022-01-08林群院士:算法突破“極限”,科技創(chuàng)新正在更新教學
2020-06-25? 昆侖專題 ?
? 高端精神 ?

? 新征程 新任務 新前景 ?

? 習近平治國理政 理論與實踐 ?

? 我為中國夢獻一策 ?

? 國資國企改革 ?

? 雄安新區(qū)建設 ?

? 黨要管黨 從嚴治黨 ?

熱點排行

 張捷評聯(lián)想之【1一50】+10
張捷評聯(lián)想之【1一50】+10
建言點贊
 張文木:好理論要回答時代問題
張文木:好理論要回答時代問題

? 社會調(diào)查 ?
圖片新聞